Overview
The project aims to create a motion detection system using a Passive Infrared (PIR) sensor and the VSDsquadron Mini Board. When motion is detected by the PIR sensor, the system activates an LED to indicate the presence of motion.
- Detection : The PIR sensor continuously monitors its surroundings for any movement. When it detects motion, it sends a signal to the VSDsquadron Mini Board.
- Processing : The VSDsquadron Mini Board receives the signal from the PIR sensor and processes it using its onboard microcontroller.
- LED Activation : Upon detecting motion, the microcontroller activates the LED connected to it, illuminating it to indicate the presence of motion.
Components
- PIR Sensor
- VSDSquadron Mini Board
- LED
- Jumper wire(Female to FEmale)
- VS Code for uploading the code in which PLATFORM IO installation should be there.
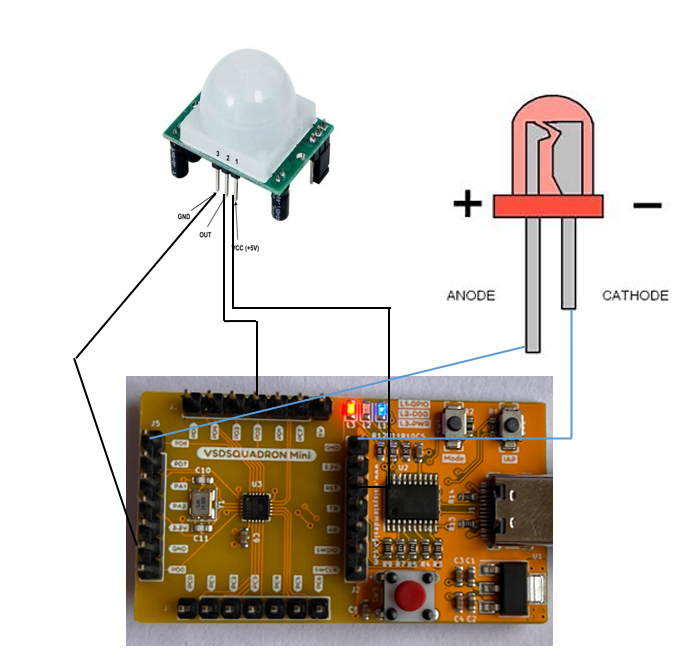
Hardware Connections
PIR CONNECTIONS
- Output Pin of PIR connected to PD2 Of VSDSquadron Mini Board.
- VCC Of PIR coonected to 5V Of VSDSquadron Mini Board.
- GND Pin of PIR connected to GND Of VSDSquadron Mini Board.
LED CONNECTION
- LED Anode Pin connected to PD6 Of VSDSquadron Mini Board.
- LED Cathode connected to GND Of VSDSquadron Mini Board.
Code for Programming
#include <ch32v00x.h>
#include <debug.h>
#define BLINKY_GPIO_PORT GPIOD
#define BLINKY_GPIO_PIN GPIO_Pin_6
#define PIR_GPIO_PIN GPIO_Pin_2 // PIR sensor output connected to GPIO Pin 2
#define BLINKY_CLOCK_ENABLE RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD, ENABLE)
void NMI_Handler(void) _attribute_((interrupt("WCH-Interrupt-fast")));
void HardFault_Handler(void) _attribute_((interrupt("WCH-Interrupt-fast")));
void Delay_Init(void);
void Delay_Ms(uint32_t n);
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
SystemCoreClockUpdate();
Delay_Init();
GPIO_InitTypeDef GPIO_InitStructure = {0};
BLINKY_CLOCK_ENABLE;
GPIO_InitStructure.GPIO_Pin = BLINKY_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(BLINKY_GPIO_PORT, &GPIO_InitStructure);
// Configure PIR sensor input pin
GPIO_InitStructure.GPIO_Pin = PIR_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // Input mode with pull-up
GPIO_Init(GPIOD, &GPIO_InitStructure);
while (1)
{
// Read PIR sensor status
uint8_t pirStatus = GPIO_ReadInputDataBit(GPIOD, PIR_GPIO_PIN);
// Control the LED based on PIR sensor output
if (pirStatus == 1) // PIR sensor detected motion
{
GPIO_WriteBit(BLINKY_GPIO_PORT, BLINKY_GPIO_PIN, SET); // Turn on LED
}
else
{
GPIO_WriteBit(BLINKY_GPIO_PORT, BLINKY_GPIO_PIN, RESET); // Turn off LED
}
Delay_Ms(1000);
}
}
void NMI_Handler(void) {}
void HardFault_Handler(void)
{
while (1)
{
}
}